《算法图解》读书笔记
《算法图解》读书笔记。
第一章 算法简介
二分查找
二分查找是一种算法,其输入必须是有序的元素列表。
对于包含n个元素的列表,使用二分查找最多需要$\log_2^n$步
对数运算是幂运算的逆运算
1 | log_2^n = a → 2^a=n |
在使用大O表示法讨论运行时间时,$\log$指的都是$\log_2$(以2为底)
二分法的JS实现:
1 | // 二分法查找 |
对于Python,如果取非整数索引,会自动向下取整,但是JS中不会,因为JS中的数组本质上是一个对象:
1 | let a = ['x', 'y']; |
所以如果为JS数组的非整数索引赋值,结果如下:
1 | let a = [1, 2]; |
运行时间
线性时间:最多需要查找的次数与列表长度相同$O(n)$
对数时间:最多需要查找的次数要$\log_2^n$, $O(\log n)$
$O(\log n)$比$O(n)$快,当需要搜索的元素越多,前者比后者快得就越多
大O表示法
仅仅知道算法需要多长时间能运行完还不够,还需要知道运行时间如何随列表增长而增加。大O表示法表示的是算法运行时间的增速。
大O表示法指出的是最糟糕的情况下的运行时间。
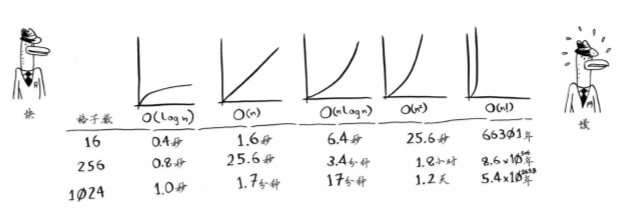
一些常见的大O运行时间有:
$O(\log n)$,对数时间,例如二分查找$O(n)$,线性时间,例如简单查找$O(n * \log n)$,例如快速排序,一种比较快的排序算法$O(n^2)$,例如选择排序,一种比较慢的排序算法$O(n!)$,例如旅行商问题的解决方案,一种非常慢的算法
算法的速度指的并非时间,而是操作数的增速(随着输入的增加,运行时间将以什么样的速度增加)。
第二章 选择排序
内存的工作原理
需要将数据存储到内存是,你请求计算机提供存储空间,计算机给你一个存储地址。需要存储多项数据时,有两种基本方式:数组和链表
数组
数组所分配的内存空间都是紧紧相连的。如果为数组添加新元素时,当前数组占用的内存满了,则需要将数组元素转移到其他地方。可以预留内存,但是都会带来两个缺点:
- 浪费内存
- 预留的内存用完后,还需要转移元素
数组的优点:需要随机的读取元素时,数组效率很高。
链表
链表中的每个元素都存储了下一个元素的地址,从而使一系列随机的内存地址串在了一起。
链表的优势在与插入元素方面,而且如果需要同时读取所有元素时,链表的效率很高。
在中间插入元素
使用链表插入元素很简单,只需要修改它前面的额按个元素指向的地址。使用数组插入元素时,则必须将后面的所有元素都后移。
在中间插入元素,链表是更好的选择。
删除元素
需要删除元素,链表也是更好的选择。
数组和链表的比较
数组用的更多,因为它支持随机访问,所以数组的读取速度更快。而链表只能顺序访问。
数组和链表常见的操作的运行时间:
| – | 数组 | 链表 |
|---|---|---|
| 读取 | $O(1)$ |
$O(n)$ |
| 插入 | $O(n)$ |
$O(1)$ |
| 删除 | $O(n)$ |
$O(1)$ |
Facebook存储用户信息的方法
Facebook存储用户信息时用的是链表数组,数组包含26个元素,每个元素指向一个链表。
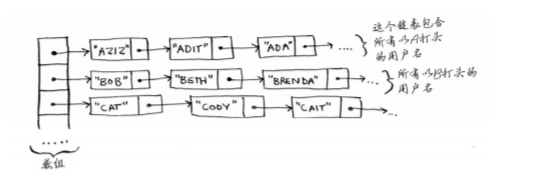
插入元素时,对数组的移动最多26次,然后再从它指向的链表中进行插入。
读取元素时,可以直接找到数组中的对应元素,然后在链表中查找。
那么查找元素时,会不会效率太低?
选择排序
选择排序的原理就是每一轮在n个元素中进行查找,找出最小元素,放到结果当中。
每一轮的操作时间复杂度为$O(n)$,这样的操作需要执行n次,所以时间复杂度为$O(n^2)$
有一个问题,每一轮进行后,下一轮要检查的元素会逐渐减少,实际随后检查的元素格式是一个公差为1的等差数列n-1、n-2…2、1,平均每次检查的元素是n/2,因此运行时间为$O(n * n/2)$,但是大O表示法会忽略诸如1/2这样的常数,所以为$O(n^2)$
选择排序的JS实现:(从小到大排序)
1 | function chooseSort (arr) { |
选择排序的速度不是很快,快速排序的速度更快,时间复杂度为$O(n * \log n)$
第三章 递归
递归是一种很多算法都使用的一种编程方法。
递归只是让解决方案更加清晰,并没有性能上的优势。实际上在有些情况下使用循环的性能更好。
基线条件和递归条件
编写递归函数时,必须告诉它何时停止。每个递归函数都有两部分:基线条件(base case)和递归条件(recursive case)。递归条件指的是函数调用自己,而基线条件值得是函数不再调用自己,避免造成无限循环。
栈
栈是一种简单的数据结构,有两种操作:压入和弹出。
计算机内部使用被称为调用栈的栈。在调用过程中,调用另一个函数时,当前函数暂停并处于未完成状态。该函数的所有变量的值都保留在内存中。
在递归调用栈中,包含着未完成的函数调用,自己无需跟踪哪些函数还没有被执行,栈会完成这个步骤。
使用栈很方便,但是也有性能代价,存储详尽的信息可能占用大量的内存。每个函数调用都要占用一定的内存,如果栈很高,那么以为这计算机储存了大量函数调用的信息。
解决方法:
- 改用循环
- 使用尾递归(尾递归的实现需要确保最后一步只调用自身。做到这一点的方法,就是把所有用到的内部变量改写成函数的参数)
第四章 快速排序
分治法
分治法是解决问题的一种思路,一种递归式问题解决方法。
用分治法解决问题有包括两个步骤:
- 找出基线条件(即递归终止的条件),这种条件必须尽可能简单
- 不断将问题分解(或者说缩小规模),直到符合基线条件
一道题目:将一个长度为length、宽度为width的矩形均匀地分成方块,并确保分出的方块是最大的
分析这道题,首先要找出递归条件,最容易处理的情况是一条边的长度是另一条边的整数倍。这个时候就可以将矩形均匀地分成方块。
然后找出递归条件,每次递归都需要缩小问题规模。首先找出这块地可容纳的最大方块A,剩余的土地为B,根据欧几里得算法,适用于这小块地的最大方块,也是适用于整块地的最大的方块(就这个算法我就不知道,真做的时候就做出不来)。据此就可以不断的缩小规模,直到满足基线条件:
1 | // 找到一个矩形可以均匀的划分的最大的小方块的尺寸 |
tips: 编写设计数组的递归函数时,基线条件通常是数组为空或者只包含一个元素。
快速排序
快速排序的思想就是分治法,首先从最简单情况开始分析,找出基线条件,那就是数组为空或者只包含一个元素,然后逐渐增加到两个元素,三个元素。
到了三个元素的时候,首先选出基准值,然后分别找出比基准值小和比基准值大的元素(即分区),这样就得到了三个部分:
- 小于基准值的数字组成的数组(无序)
- 基准值
- 大于基准值组成的数组(无序)
然后对1和3再次进行快速排序,直到满足基线条件(即数组的长度为0或者1)为止。
1 | const quickSort = (arr) => { |
快速排序的时间复杂度是$O(n * \log n)$
再谈大$O$表示法
c是算法所需要的固定时间量,被称为常量。通常不考虑这个常量,因为如果算法的大$O$运行时间不同,这种常量将无关紧要。
但有时候,常量的影响可能很大,如果运行时间都是$O(n * \log n)$,那么常量就会影响很大。这也是快速排序比合并排序快的原因。
下面要分析一下,快速排序的时间复杂度为什么是$O(n * \log n)$
快速排序的性能高度依赖于选择基准值,如果总是将第一个元素用作基准值,栈长为n(即总共要调用n次),每一轮要比较n个数字,每轮完成时间为$O(n)$,这就是最糟情况,这时候快速排序的运行时间是$O(n^2)$
如果总是将中间的元素用作基准值,栈长变成了$O(\log n)$,每一轮仍然要比较n个数字,每轮完成时间为$O(n)$,这就是最佳情况,这时候快速排序的运行时间是$O(n * \log n)$
要注意的是,最佳情况也是平均情况。只要每次都随机地选择一个数组元素作为基准值,快速排序的平均运行时间也就是$O(n * \log n)$。
快速排序是最快的排序算法之一,也是分治法的典范。
第五章 散列表
散列函数
散列函数是这样的函数,无论输入什么数据,都还给一个数字,即将输入映射到数字,散列函数必须满足:
- 每次输出的一致性
- 将不同的输入映射到不同的数字
可以使用散列函数来确定元素的存储位置。
散列函数对于散列表的性能至关终于,良好的散列函数让数组中的值呈均匀分布,SHA函数可以用作散列函数。
散列表
使用散列函数和数组,就可以创建一种被称为散列表(hash table)的数据结构。
散列表也被称为散列映射、映射、字典和关联数组。适合用于:
- 模拟映射关系
- 防止重复
- 缓存、记住数据
JavaScript中的对象结构就是语言实现了的散列表结构。
性能
散列表的性能:
| – | 平均情况 | 最糟情况 |
|---|---|---|
| 查找 | $O(1)$ |
$O(n)$ |
| 插入 | $O(1)$ |
$O(n)$ |
| 删除 | $O(1)$ |
$O(n)$ |
在平均情况下下,散列表执行各种操作的时间都是$O(1)$。$O(1)$被称为常量时间,它并不意味着马上,而是说不管散列表大多,所需的时间与长度无关,都是相同的数值。
所以在JavaScript中,使用对象存储数据并进行查找的性能大于使用数组存储,可以认为是$O(1)$
第六章 广度优先搜索(BFS)
图算法
广度优先搜索算法(breadth-first search,BFS)是一种图算法,可以找出两样东西之间最短的距离,即解决最短路径问题。
解决最短路径问题有两个步骤:
- 使用图来建立问题模型
- 使用广度优先搜索解决问题
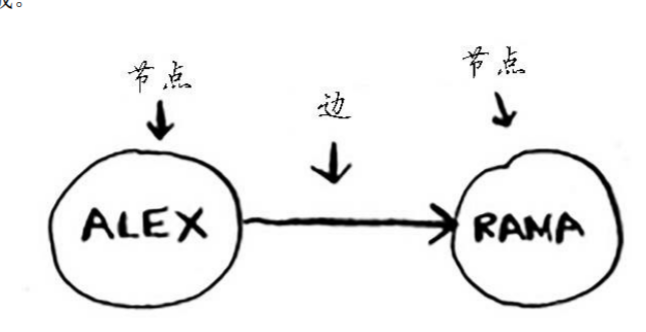
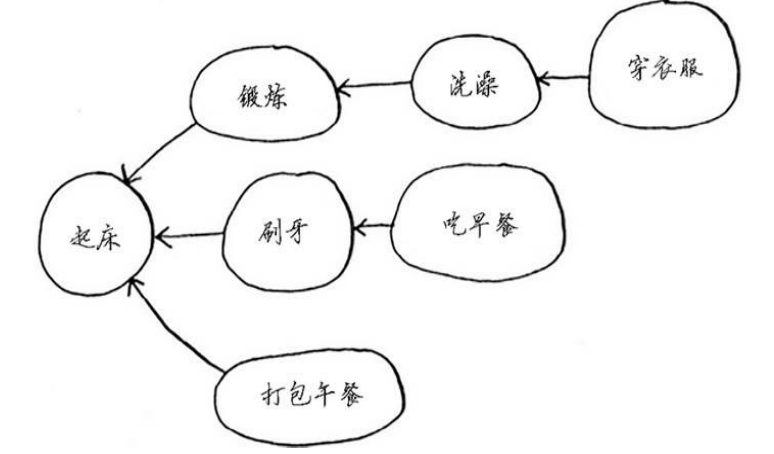
图用来模拟不同的东西是如何连接的,由节点和边构成
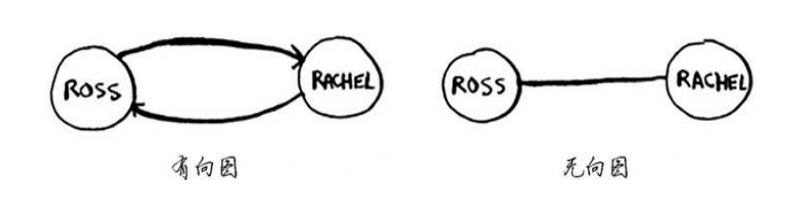
有向图的关系是单向的,边是箭头,箭头指定了关系的方向;无向图没有剪头,关系是双向的。
如果任务A依赖于任务B,在列表中任务A就必须在任务B后面,这被称为拓扑排序。
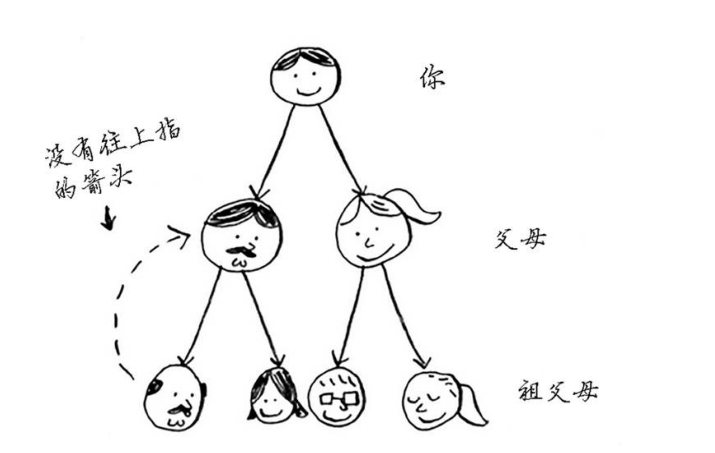
树是一种特殊的图,其中没有往后指的边。
广度优先搜索
广度优先搜索是一种用于图的查找算法,可以解决两类问题:
- 从节点A出发,有前往节点B的路径吗
- 从节点A出发,前往节点B的哪条路径最短
在广度优先搜索的执行过程中,搜索范围从起点开始逐渐向外延伸,即先检查一度关系,再检查二度关系。广度优先搜索不仅查找从A到B的路径,而且找到的是最短的路径,但是一定要按添加顺序检查,队列(queue)是一种可以实现这种目的的数据结构。
队列
队列只支持两种操作:入队和出队。队列是一种先进先出(First In First Out)的数据结构,而栈是一种后进先出(Last In Frist Out)的数据结构。
实现算法
实现广度优先搜索的关键是,要使用队列来存放要搜索的结果,这个队列是在搜索的过程中不断变增加的。在遍历一层时,如果不是目标,则将这个元素的后代加入到待搜索队列中。同时使用一个对象标记对象是否已经遍历过(针对无向图,防止无限循环出现,对于树结构来说则不需要)
如果是实现最短路径,在将后代元素加入到待搜索队列中时,应该以对象的形式加入,因为要补充一个队列,用来存放当前遍历的路径。
运行时间
在整个关系网中进行搜索,以图算法来看,运行时间至少为$O(边数)$,此外还使用了一个队列来存放待搜索元素,将一个元素添加到队列的时间是固定的为$O(1)$,对每个元素都这样做的总时间为$O(n)$。
所以广度优先搜索的运行时间为$O(边数+顶点数)$,通常写作$O(V+E)$,V是顶点数,E是边数。
第七章 迪克斯特拉算法
广度优先搜索找出的是段数最少的路径,如果每段路径有着不同的权重,要找出最快的路径,可以使用迪克斯特拉算法
使用迪克斯特拉算法
迪克斯特拉算法包含四个步骤
- 找出“最便宜”的节点,即可在最短时间内到达的节点
- 更新该节点的邻居的开销
- 重复这个过程,直到对图中每个节点都这样做了
- 计算最终路径
迪克斯特拉算法背后的关键理念:找出图中最便宜的节点,确保没有到该节点的更便宜的路径
负权边
如果有负权边,就不能使用迪克斯特拉算法。
因为节点一旦被处理,就以为这没有前往该节点的更便宜的路径,但是如果有负权边,那么就会在最片的路径被发现后,在负权边的路径上发现更便宜的节点。
在有负权边的图中,要找出最短路径,可以使用贝尔曼-福德算法。
迪克斯特拉算法的实现
迪克斯特拉算法的实现需要四个散列表:
- 用于存储节点、节点的邻居以及前往节点邻居的开销
graph - 用于存储每个节点的最短开销
costs - 用于存储每个节点最短开销情况下的父节点
parents - 用于存储已经遍历过的节点
processed
实际上上面这四个散列表就是迪克斯特拉算法需要的数据结构,需要将图转换为对应的数据结构后,对这种特定的数据结构使用算法,达到目的。
以下面的图距离:
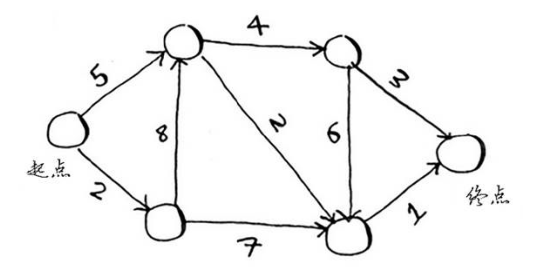
首先实现第一个散列表(也就是JS中的对象)graph
1 | // 用于存储节点、节点的邻居以及前往节点邻居的开销 |
然后实现第二个对象costs:
1 | // 用于存储每个节点的最短开销 |
其中,没有计算的节点的开销用了Infinity无穷大来表示。
然后实现第三个对象parents
1 | // 用于存储每个节点最短开销情况下的父节点 |
第四个对象可以在函数内部声明一个对象实现,也可以直接改造第二个对象,添加一个是否遍历的属性。
构造数据结构完成之后,来实现dijkstra算法:
1 | // 找到开销最小的,并且没有遍历过的节点 |
计算结果:
1 | { cost: 8, path: 'start→a→d→end' } |
第八章 贪婪算法
教室调度问题
教室调度问题可以采用贪婪算法,具体做法如下:
- 选出最早结束的课
- 选择第一堂课结束后的,并且结束最早的课
- 重复上面的步骤
贪婪算法很简单:每一步都采取最优的做法。每步都选择局部最优解,最终得到的就是全局最优解。
背包问题
对于背包问题,贪婪算法显然不能获得最优解。些时只需要找到一个能够大致解决问题的算法,此时贪婪算法刚好可以派上用场,因为它们实现起来很容易,得到的结果由于正确结果相当接近。
1 | // 贪婪算法求解背包问题近似解 |
集合覆盖问题
假设需要将一个广播节目让全美50个州的听众都收听得到,需要在尽可能少的广播台播出,这就是集合覆盖问题。
解决覆盖问题非常难,具体方法如下:
- 列出每个可能的广播台的集合,被称为幂集,可能的子集有
$O(2^n)$个 - 在这些集合中,选出覆盖全部50个州的最小集合
运行时间为$O(2^n)$,需要一种近似算法
近似算法
使用贪婪算法可以得到非常近似的解:
- 选出这样一个广播台,它覆盖了最多的未覆盖州(即便这个广播台覆盖了一些已覆盖的州,也没有关系)
- 重复第一步,直到覆盖了所有的州
这是一种近似算法,在获得精确解需要的时间太长时,可以使用近似算法。判断近似算法优劣的标准如下:
- 速度有多快
- 得到的近似解与最优解的接近程度
这个例子的贪婪算法的时间复杂度为$O(n^2)$,其中n是广播台的数量。
这种算法的关键是求出statesNeeded(需要覆盖的州)和stateForStation(电台能够覆盖的州)的交集,求出的就是当前广播电台覆盖的所有还未覆盖的州。
在所有没有选择的电台中进行比那里,找出上面提到的交集最大的电台。不断重复这个过程,直到所有的州都被覆盖为止。
NP完全问题
为了解决集合覆盖问题,你必须计算每个可能的集合,这与旅行商问题相似,需要计算每条可能的路径。
- 当有
1个城市时,可能的路线有1条 - 当有
2个城市时,可能的路由先2条 - 当有
3个城市时,可能的路由先6条 - 当有
4个城市时,可能的路由先24条
规律就是,每增加一个城市,需要计算的路线数都将增加,可以认为增加一个城市,可能的路径就以任何一个城市为起点(n)个,重复前一种情况的可能的路径数,也就是说当有5个城市时,任选一个作为起点,有5种情况,都是「当有4个城市时」的路径树24,也就是24重复了5遍,也就是120条
这是阶乘函数,如果涉及到的城市非常多,根本就无法找出旅行商问题的正确解。
旅行商问题和集合覆盖问题有一些共同之处:需要计算所有的解,并从中选出最小/最短的那一个。这两个问题都属于NP完全问题。
旅行商问题的近似求解:随便选择出发城市,然后选择要去的下一个城市时,都选择还没去的最近的城市。选择的路径可能不是最短的,但是也比较接近了。
如何识别NP完全问题
判断问题是不是NP完全问题很难,易于解决的问题和NP完全问题的差别通常很小。可以通过以下几点来判断NP完全问题:
- 元素较少时算法的运行速度非常快,但随着元素数量增加,速度会变得非常慢
- 涉及“所有组合”的问题通常是NP完全问题
- 不能将问题分成小问题,必须考虑各种可能的情况,这可能是NP完全问题
- 如果问题涉及序列(如旅行商问题的城市序列)且难以解决,它可能就是NP完全问题
- 如果问题涉及集合(如广播台集合)且难以解决,它可能就是NP完全问题
- 如果问题可转换为集合覆盖问题或旅行商问题,那它肯定是NP完全问题
第九章 动态规划
动态规划可以在给定约束条件下找到最优解。在问题可以分解为彼此独立且离散的子问题时,就可以使用动态规划来解决。
为动态规划问题建模时的小窍门:
- 每种动态规划解决方案都涉及网格
- 单元格中的值通常就是要优化的值
- 每个单元格都是一个子问题
在绘制网格时,需要回答如下问题:
- 单元格中的值是什么
- 如何将这个问题划分为子问题
- 网格的坐标轴是什么
要注意,最终答案不一定在最后一个单元格中。
背包问题
背包问题就是典型的动态规划的应用之一。
动态规划先解决子问题,在逐步解决大问题。每个动态规划算法都从一个网格开始,背包问题的网格如下:
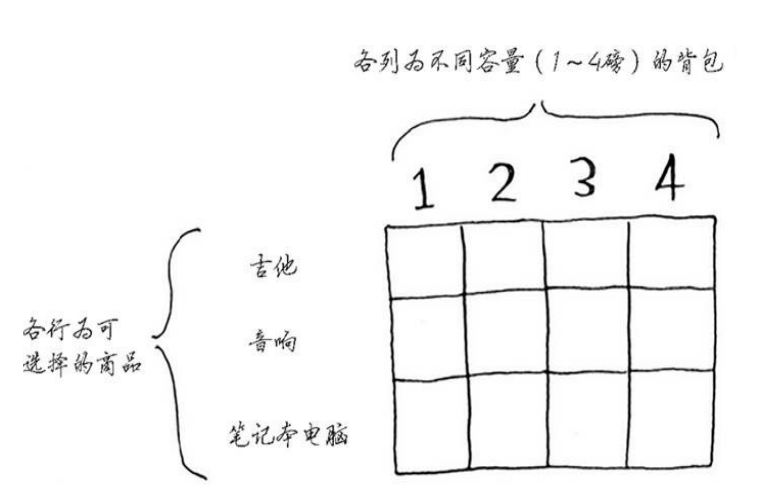
填充的过程是逐行进行的,原则是保证当前单元格的值为此列的最大值。如果装入当前单元格的物品后,重量有剩余,则回退一行,找到剩余重量对应的最大值。
使用的公式为:
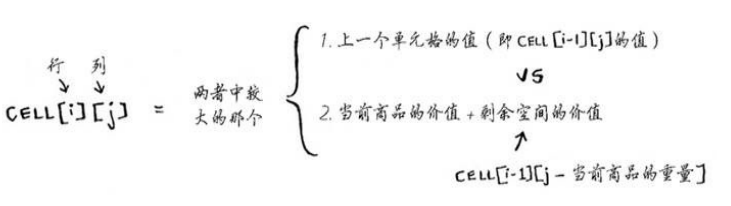
通过表格求解子问题,可以合并两个子问题的解来得到更大问题的解。
下面编写代码:
(感觉这个代码是为了这个算法生凑出来的,其实关键点把握住就行了,一是上面的公式,而是通过求解子问题,然后通过合并来求解更大问题)
1 | const knapsackProblem = () => { |
可以偷商品的一部分吗
偷商品的一部分,不能使用动态规划处理。动态规划只能处理要么拿走整件商品,要么就不拿的情况,没法判断该不该拿走商品的一部分。
这种情况应该使用贪婪算法来处理,首先尽可能多的拿价值高的商品,如果拿光了在尽可能拿价值次高的商品,以此类推。
可以相互依赖吗
如果各个项目之间有依赖情况,那么是没有办法使用动态规划来建模的。
动态规划算法能够解决子问题,并且使用这些答案来解决大问题。但是仅当每个子问题都是离散的,即不依赖于其他子问题时,动态规划才管用。
最长公共子串
在填充表格时,没有找出计算公式的简单办法,必须通过尝试才能找出有效的公式。有些算法并非精确的解决步骤,而是帮助你理清思路的框架。
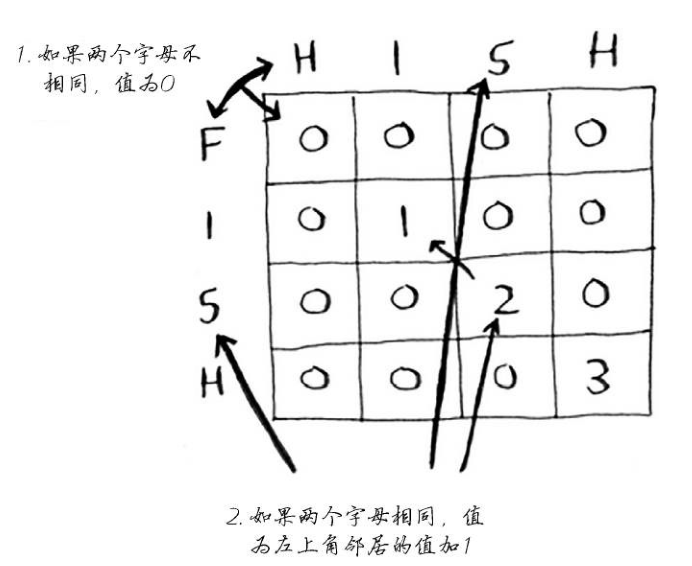
在计算FISH和HISH的最大公共子串时,填写出来的表格和计算公式是:
实现的代码:
1 | const maxSubstring = (string1, string2) => { |
也可以用这个算法来解决之前遇到过的《前端练习10 连续子串最大和》的问题,具体分析过程看那篇笔记吧。
最长公共子序列
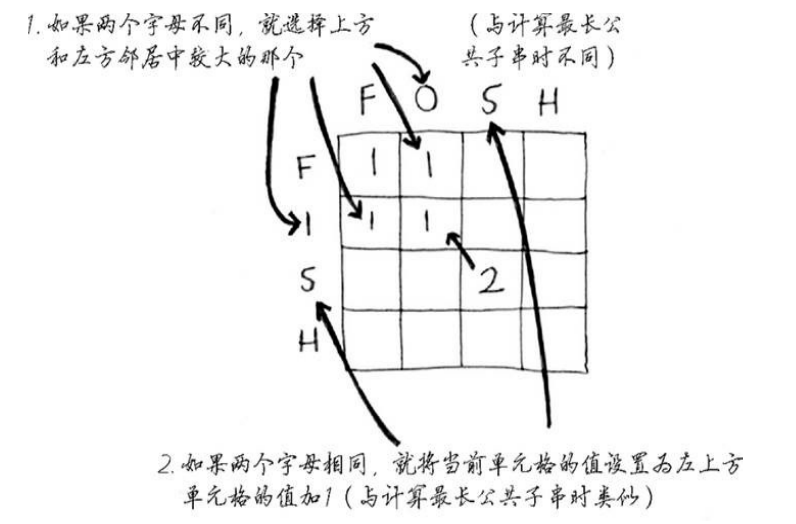
与最长公共子串不同,最长公共子序列不需要是连续的,比如FOSH与FISH的最长公共子串是SH,长度是2,而最长公共子序列是FSH,长度是3
这个问题在计算单元格数据时使用的公式与最长子串不同:
代码实现:
1 | // 最长公共子序列 |
小结
- 需要在给定约束条件下优化某种指标时,动态规划很有用
- 问题可以分解为离散的子问题时,可以使用动态规划来解决
- 每种动态规划解决方案都涉及网格
- 单元格中的值通常是你要优化的值
- 每个单元格都是一个子问题,需要考虑如何将问题分解为子问题
- 没有放之四海而皆准的计算动态规划解决方案的公式
第十章 K最近邻算法
K最近邻算法(k-nearest neighbours, KNN)简单的说就是在对一个事物分类时,如果自身没有准确的特征值用来分类,就可以看距离它最近的邻居,借此对目标分类。
创建推荐系统
(1)特征抽取
要比较推荐系统的用户,就需要以某种方式将他们放到图表中,需要将每个用户转换为这一组坐标,然后就可以计算他们的距离了。
特征抽取就是将物品转换为一系列可比较的数字。
一种抽取特征值的方法:
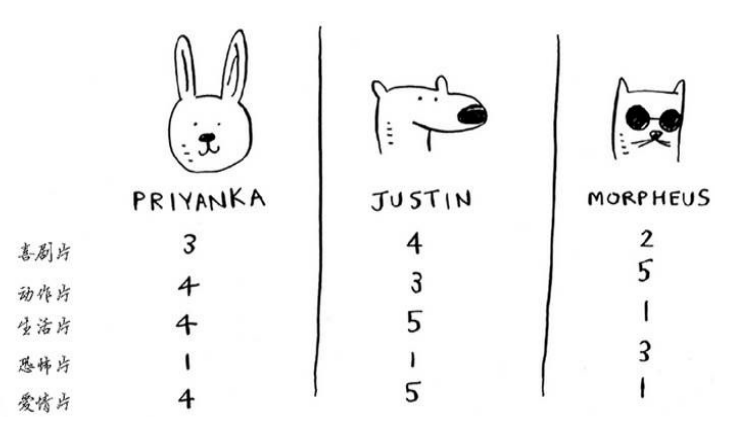
通过这些特征值可以计算距离:

(2)回归
所谓回归,就是使用KNN来做两项基本工作:分类和回归:
- 分类就是编组
- 回归就是预测结果(比如一个数字)
比如,找出与目标最接近的5个邻居,求这些人的平均分,就是回归。
可以使用余弦相似度来代替距离公式,能够更准确的找出相似的邻居。
(3)挑选合适的特征值没有通用的准则,必须考虑各种需要考虑的因素
能够挑选合适的特征事关KNN算法的成败。
机器学习
刚才的推荐系统实际上就是一个机器学习的例子,还有其他机器学习的例子
(1)OCR,光学字符识别,要自动识别字符,可以使用KNN
- 浏览大量的图像,将这些数字的特征提取出来(也就是训练)
- 遇到新图像时提取该图像的特征,再找出它最近的邻居
大多数及其学习算法都包含训练的步骤,要让计算机完成任务,必须先训练它
(2)垃圾邮件过滤器
垃圾邮件过滤器使用了一种简单算法:朴素贝叶斯分类器,用数据对分类器进行训练后,收到新的邮件,分析邮件中每个单词在垃圾邮件中出现的概率是多少
第十一章 接下来如何做
树
二叉树查找(binary search tree,BST)的特征:
- 左子树的所有节点的值都小于或等于它的根节点的值
- 右子树上所有节点的值均大于或等于它的根节点的值
下面就是一棵典型的二叉查找树:
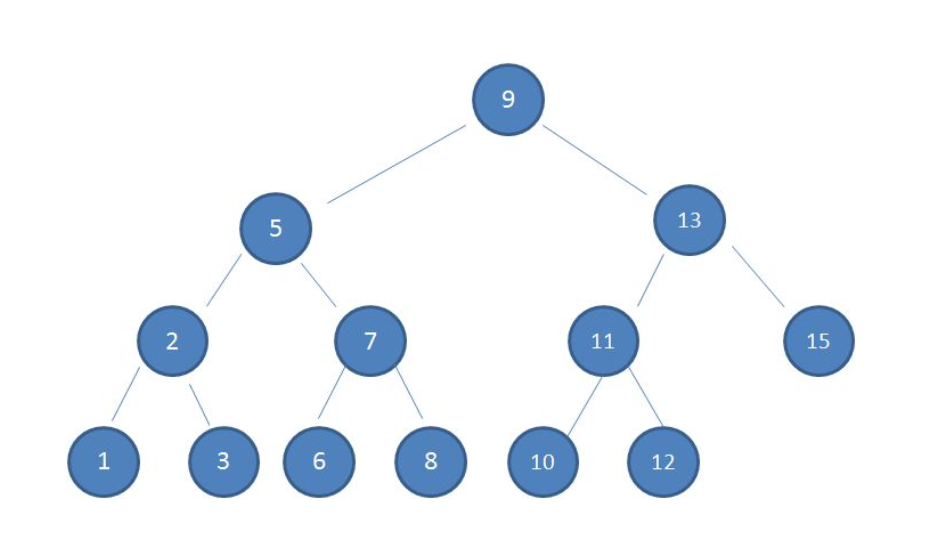
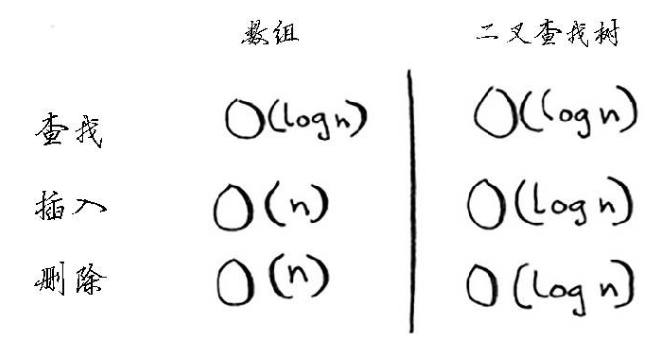
在利用二叉查找树查找节点时的思想就是二分法查找的思想,平均运行时间为$O(\log n)$,最糟的情况下所需的时间为$O(n)$。在有序数组中查找时即便是最糟情况下所需的时间也只有$O(\log n)$,但这不意味着有序数组比二叉查找树更佳,因为二叉查找树的插入和删除操作的速度快的多:
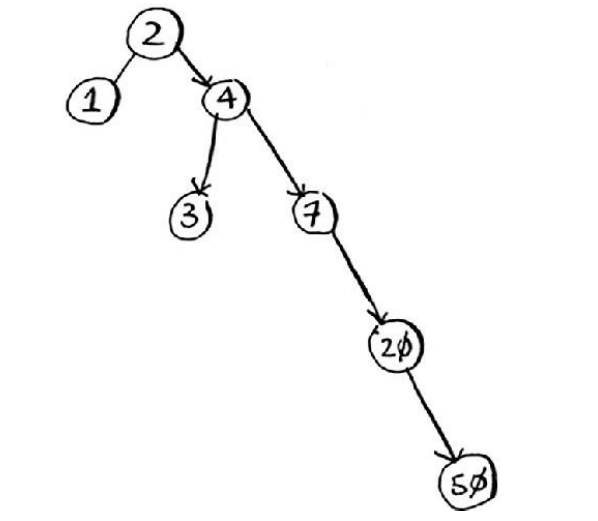
二叉树的查找的最大次数等同于二叉查找树的高度。
二叉查找树也有一些缺点:不能随机访问,并且如果二叉查找树处于失衡状态下,查找的性能会大打折扣,几乎变成了线性查找:
如何解决二叉树多次插入新节点而导致的不平衡呢?可以使用红黑树来解决,红黑树(Red Black Tree)是一种自平衡的二叉查找树,除了符合二叉查找树的基本特征之外,还有一系列的附加特性,通过每次插入新节点后的处理(变色、反转)来保证自身符合红黑树的附加特性,实现了自平衡
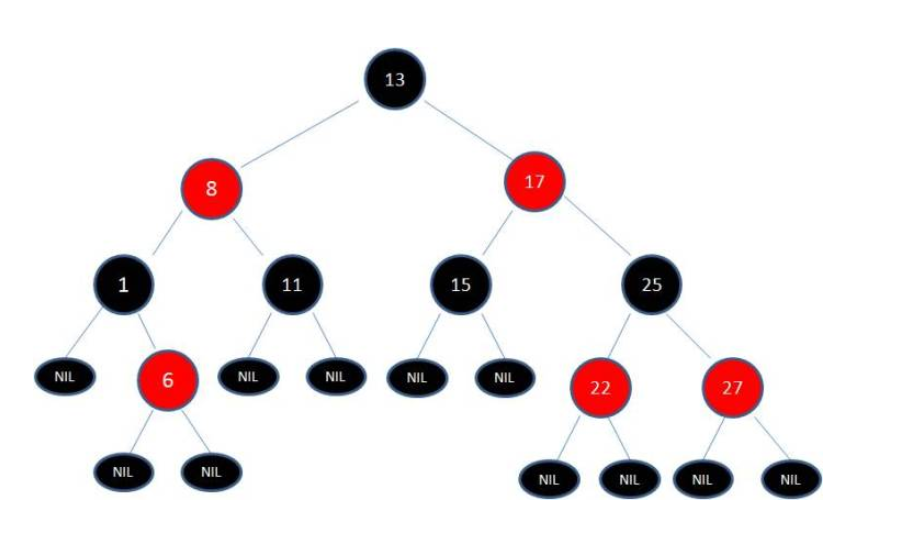
知乎这篇文章讲解二叉查找树和红黑树讲的很好,通俗易懂。
反向索引
搜索引擎的工作原理就是使用反向索引这种数据结构:一个散列表,将单词映射到包含它的页面
傅里叶变换
(1)傅立叶级数
傅立叶级数实际上就是把$f(x)$看作是圆周运动的组合。只是$x$是不断变大的,而不是绕着圆变换的,所以就画出了函数曲线:
不断增大的$x$就好像是时间流逝,永不回头,所以我们也称为“时域”。
时域是现实存在的,频域却是生造的了,理解起来更加抽象。但频域是傅立叶级数(变换)更本质的内容。
傅里叶技术的一个典型应用就是图像压缩,哪些基上的坐标值特别小,就可以丢掉,这样就可以压缩图像,JPG就是利用傅里叶进行图片压缩的
(2)傅里叶变换
傅立叶级数是基于周期函数的,如果将周期推广到$\infty$,那么也就变为了非周期函数,这就是傅里叶变换
这部分的内容可以参考如何通俗地理解傅立叶变换?和如何理解傅立叶级数公式?
MapReduce
MapReduce是一种流行的分布式算法,可以通过流行的开源工具Apache Hadoop来是实现它。
Hadoop是一个由Apache基金会所开发的分布式系统基础架构。用户可以在不了解分布式底层细节的情况下,开发分布式程序。充分利用集群的威力进行高速运算和存储。Hadoop实现了一个分布式文件系统(Hadoop Distributed File System),简称HDFS。HDFS有高容错性的特点,并且设计用来部署在低廉的(low-cost)硬件上;而且它提供高吞吐量(high throughput)来访问应用程序的数据,适合那些有着超大数据集(large data set)的应用程序。HDFS放宽了(relax)POSIX的要求,可以以流的形式访问(streaming access)文件系统中的数据。
Hadoop的框架最核心的设计就是:HDFS和MapReduce。HDFS为海量的数据提供了存储,则MapReduce为海量的数据提供了计算。
分布式算法非常实用用于在短时间内完成海量工作,其中的MapReduce基于两个简单的历年:映射(map)函数和归并(reduce)函数
映射函数很简单,它接受一个数组,并对其中的每个元素执行同样的处理。映射函数是将一个数组转换为另一个数组。而归并函数的理念是将很多项归并为一项,将一个数组转换为一个函数
MapReduce是第一代计算引擎,Tez和Spark是第二代。MapReduce的设计,采用了很简化的计算模型,只有Map和Reduce两个计算过程(中间用Shuffle串联),用这个模型,已经可以处理大数据领域很大一部分问题了。
关于MapReduce的介绍可以看这篇文章。
布隆过滤器和HyperLogLog
布隆过滤器是为了解决在海量数据中查找某个键是否存在的技术,它是一种概率性型数据结构,提供的答案有可能不对,但很可能是正确的。
判断网页以前是否已搜集,可以不适用散列表,而是用布隆过滤器,它的优点在于占用的存储空间少,非常适合于不要求答案绝对准确的情况。
关于布隆过滤器的原理可以参考这篇文章。
HyperLoglog是一种类似于布隆过滤器的算法。可以近似地计算集合中不同的元素数,提供不精确的去重计数,它也不能给出准确的答案,但是八九不离十,而占用的内存空间却少得多。关于HypoerLogLog的解释可以阅读这篇文章。
上面的这两种都是概率算法,都要求允许统计巨量数据面前的误差范围可以接受。
SHA算法
SHA函数(secure hash algorightm)是一种安全散列算(也就是哈希算法),给定一个字符串,SHA返回其散列值。
有两种应用:
(1)比较文件
对于不同的字符串,SHA生成的散列值不同,可以利用SHA来判断两个文件是否相同,在比较超大型文件时很有用,可以计算文件的SHA散列值,再对结果进行比较。
(2)检查密码
SHA能在不知道原始字符串的情况下进行比较,进行密码登陆时,不会直接存储密码,而是比较散列值。网站保存的不是原始密码,而是密码的散列值。
SHA散列算法是单项的,可以根据字符串计算散列值,但是无法根据散列值推出原始字符串。
SHA实际上是一系列散发:SHA-0/SHA-1/SHA-2/SHA-3,SHA-0和SHA-1被发现存在一些缺陷,应该使用SHA-2和SHA-3来计算密码散列值,最安全的散列函数是bcrypt。
关于各种散列算法的介绍可以阅读这篇文章。
局部明暗的散列算法
SHA算法是局部不敏感的,对一个字符串,如果只改动了其中一个字符,得到的两个散列值是完全不同的,这就让攻击者无法通过比较散列值是否类似来破解密码。
如果希望散列函数是局部明暗的,可以使用Simhash,对字符串进行细微的修改,Simhash生成的散列值也只存在细微的差别。这就可以通过比较散列值来比较两个字符串的相似程度,应用:
- Google来判断网页是否被收集
- 论文查重/资源查重
需要检查两项内容的相似程度时,可以使用Simhash。
Diffie-Hellman密钥交换
Diffie-Hellman密钥交换解决了两个问题:
- 双方无序知道加密算法,不必会面协商使用的加密算法
- 破解加密非常困难
使用了两个密钥:公钥和私钥。它的替代者是RSA,被广泛使用。
线性规划
线性规划用于在给定约束条件下最大限度的改善指定的指标。
所有的图算法都可以使用线性规划来实现,图问题知识线性规划的一个子集。
线性规划使用Simplex算法。